
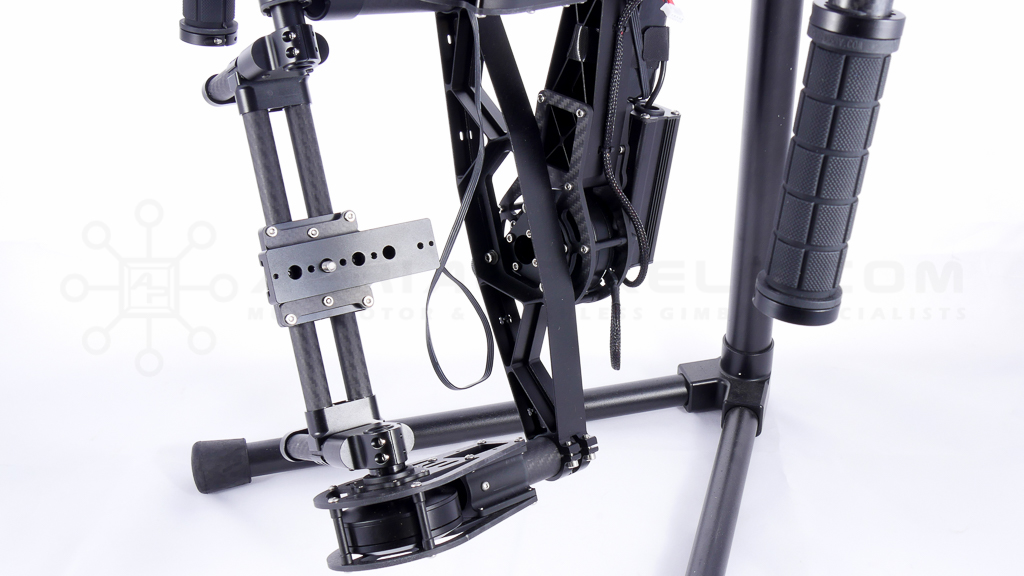
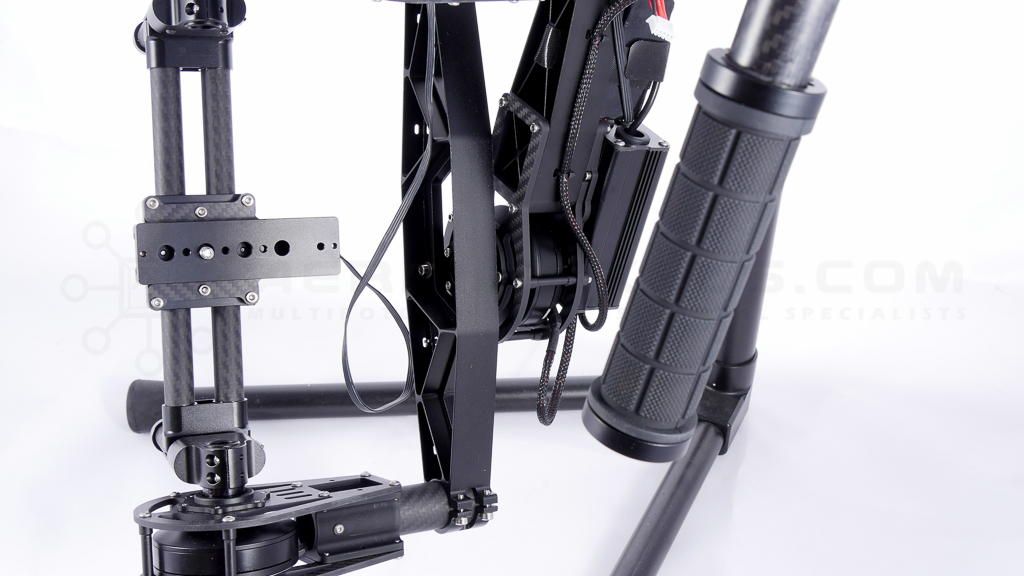
Tool-less design with dual IMU Alexmos 32 BIT controller. Comes with charger and battery. Available soon.






Tool-less design with dual IMU Alexmos 32 BIT controller. Comes with charger and battery. Available soon.
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_44b3.zip
User Manual (English): SimpleBGC_32bit_manual_2_44_eng.pdf
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_43b9.zip (6Mb 9.12.2014)
User Manual (English): SimpleBGC_32bit_manual_2_43_eng.pdf (813Kb 8.12.2014)
User Manual (French) translation by Nono15: SimpleBGC_32bit_manual_2_43_fra.pdf (1Mb 26.11.2014)
User Manual (Russian): SimpleBGC_32bit_manual_2_43_rus.pdf (950Kb 8.12.2014)
[wc-social-coupon]
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_43b4.zip (6Mb 20.10.2014)
User Manual (English): SimpleBGC_32bit_manual_2_43_eng.pdf (933Kb 20.10.2014)
User Manual (Russian): SimpleBGC_32bit_manual_2_43_rus.pdf (1Mb 21.10.2014)
User Manual (English): SimpleBGC_32bit_manual_2_42_eng.pdf