Alexmos Setup Guide FAQ – Aereialpixels.com
Q: OK I got an Alexmos Board and …..
A: STOP. Do you have an authentic board? Please click here and verify that you have an authentic board. Every answer below assumes you have one.
Q: Now what?
A: Firmware. Some boards come preloaded with firmware some just come with the Alexmos bootloader. It’s a good practice to install the USB drivers, download the GUI and flash current firmware.
Q: Do I need to have power connected in order to flash the firmware?
A: No. All you need is the USB cable plugged in to the controller.
Q: Do I need to have the motors, IMU, 3rd Axis or any other external device plugged in?
A: USB only will be just fine.
Q: Oh Snap! I think I ruined the on board USB connector by forcing in the cable. I now have a paper weight.
A: Not really. You can use a Bluetooth adapter or a FTDI adapter to connect to the controller. If you are using the gimbal for work it’s a good idea to always have both in case you damage the surface mounted USB connector. The FTDI adapters are cheap and can be found on ebay for about $8 shipped. You would connect the FTDI adapter the same way you connect the bluetooth adapter.
Q: Where do I get the USB drivers from?
A: Download Drivers
Q: Where do I get the GUI and Firmware files from?
A: All required Alexmos related files Download
Q: OK. Downloaded all of the above, but I have trouble getting the board to talk to my PC and flashing the firmware
A: Here’s a video guide on how to get the driver installed, connect to USB and Flash firmware
[wp_lightbox_prettyPhoto_anchor_text_video link=”http://www.youtube.com/watch?v=mSHZOz9GqYY” width=”800″ height=”600″ text=”Click here to open the Youtube video” description=”Alexmos Driver Guide”]
Q: I tried flashing using the GUI but nothing happens
A: Make sure you can see the COM port assigned to the Alexmos board by opening up the DEVICE MANAGER
Q: I can see the COM port but GUI will not connect or flash the firmware
A: 1) Bad UART chip (bad USB driver device in the controller board) = the board is bad. You will need to replace. 2) Flashing using the GUI is not working properly and time to try out XLOADER, links are above
Geek out: You can try a FTDI adapter or a Bluetooth adapter if you think UART is bad, there’s a 50/50 chance it might work
Q: GUI Connects, Alerts “GUI Version Mismatch” but flashing through the GUI does not work.
A: You can try XLOADER to flash the firmware and the links to download can be found above.
Q: OK I selected the COM port in XLOADER, selected the firmware file and started to flash. After a few seconds XLOADER came back and said “failed”
A: Not to worry, its normal. Close XLOADER application, open the GUI and try to connect.
You can also keep a track of what’s happening while flashing by looking at the LED lights of the controller. Moment the board goes into FLASH mode, the GREEN LED will go off and the RED LED will be constantly lit. After the flashing is done (when XLOADER states it FAILED) the GREEN LED will start to blink. Now would be a good time to connect the GUI.
Q: Everything went as planned but when I connect using the GUI error pops up and says GUI version mismatch. I am sure I am using the correct firmware file and the correct GUI….?
A: Corrupted Bootloader. At this point there’s very little you can do other than go for a replacement. If the installed firmware is not “too old” for your requirements, you can surely download the corresponding GUI and carry on. This does not mean the functionality of the internal code is corrupted, just the bootloader.
Geek out: You can try flashing up and down and at times it might take the newer firmware. No guarantee.
Q: I have a perfectly functioning gimbal but I really would like to try that new cool firmware with all those fancy features…?
A: STOP! Leave it alone. Unless you are missing out on some critical feature enjoy what you have until the bugs are ironed out on new releases. If you are using the gimbal for commercial applications, do yourself a favor and try out new things in a completely separate setup. No new feature is worth more than the next shoot.
Q: But wait, I can go back right? Flash the old working firmware and load the saved profile and bam!?
A: Yes and No. Sometimes things don’t go as planned when you downgrade.
Q: OK I have firmware flashed, connected to GUI, now?
A: Now would be a good time to really understand IMU orientation. Unplug the USB plug-in the IMU lay it flat on a table with components facing up. Plug in the USB connect to GUI hit calibrate. When the calibration is done pick up the IMU and move it around notice the 3 dials in the GUI. Try to correlate your movements to the dials. Soon you will understand which axis moves in what direction depending on movement. Try and change orientation by changing the Z, Y & X values. Change one value at a time to keep things simple. Let’s say you pick -Z and X and click save. If you leave the IMU on the table with components facing up you will notice that pitch is upside down. In the sense with this orientation you can mount the sensor upside down. There are many illustrations and videos online about orientation but it’s best you spend considerable time trying to understand IMU orientation. Everything in a gimbal is solely based on IMU feedback and learning orientation on your terms will help you immensely once you start building your gimbal. There is no limitation in where you can mount the IMU sensor once you have figured out the corresponding Z, Yand X values.
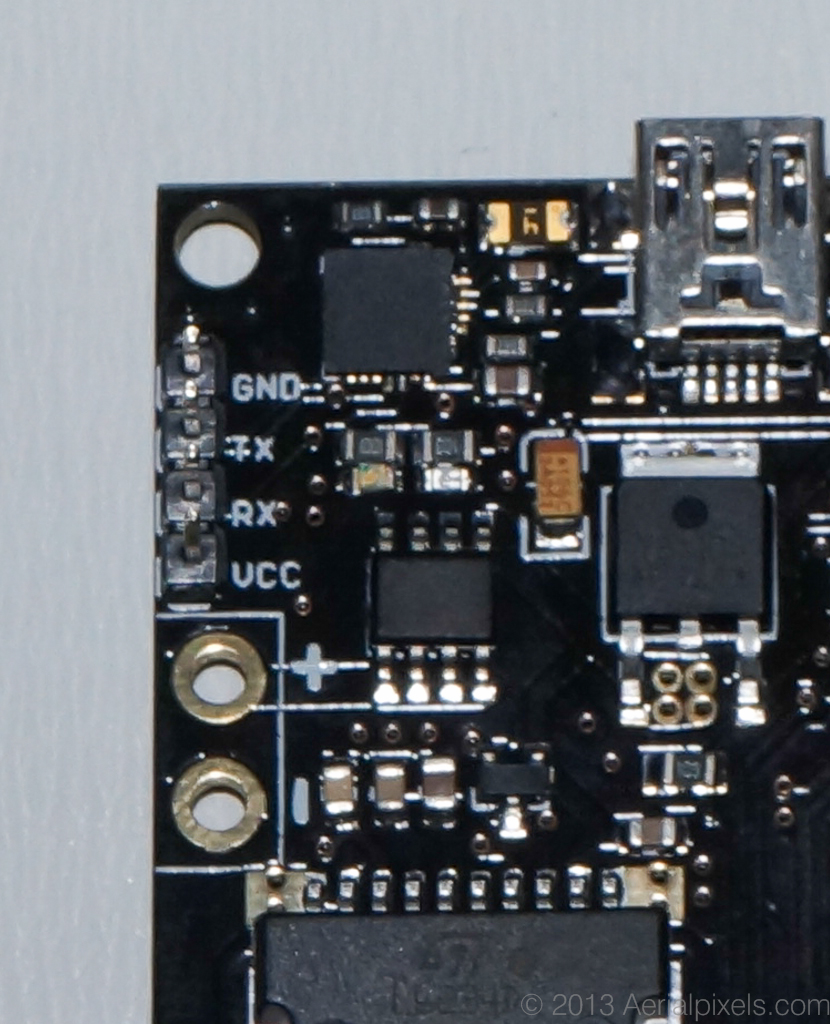
Q: I got the board but don’t have any diagrams to help me figure out what’s what?
There are few manufacturers and they all have their own way of laying out the components. But basic outputs and inputs are universal
Power: This is where you connect your lipo battery (12v to 16v) or regulated 12V to the gimbal controller. Will be labeled
- +
- –
IMU connector: Make sure the labels correspond when you wire the IMU specially if you are not using a premade connector. There are no limitations on how you can connect the 2 as long as the 4 inputs /outputs match.
IMPORTANT: Never Unplug or plug in the IMU Sensor while the board is powered, not even USB!
IMU Conections will be labeled
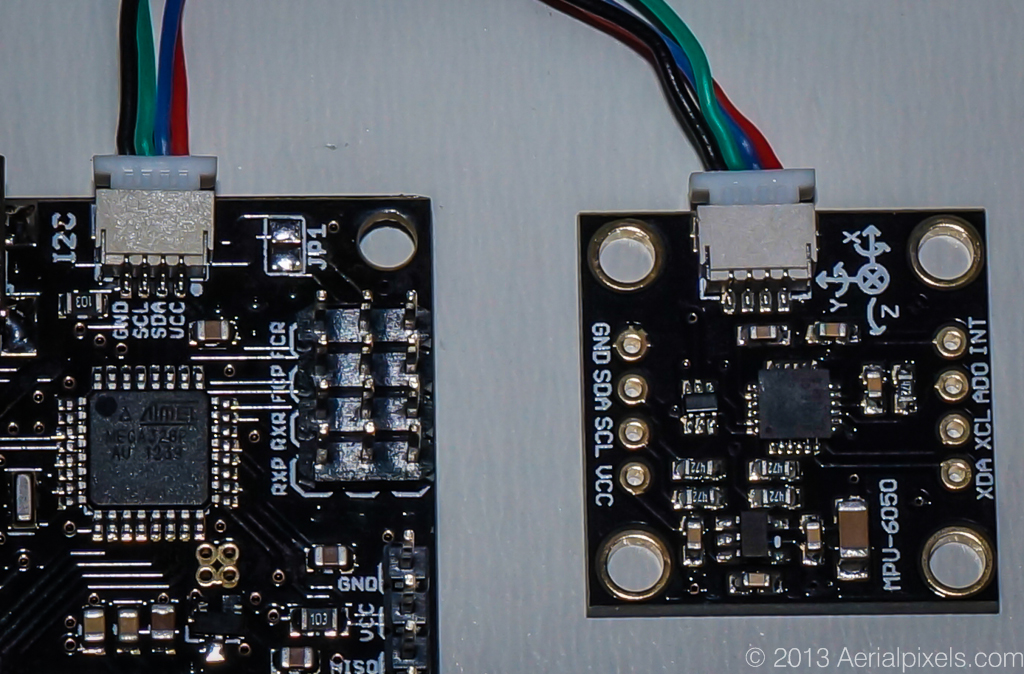
- VCC or +5V
- SDA
- SCL
- GND
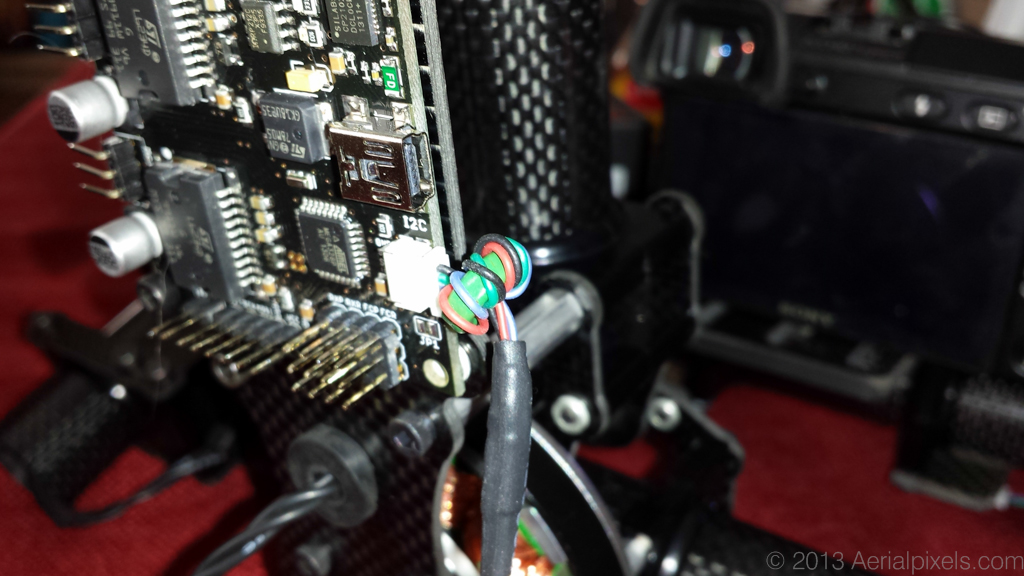
Q: Do I need to twist the IMU wires?
A: honestly this is a preference. Yes twisting cancels out certain amount of interference but when it comes to RFI theres a method to the twist as in how close to each other, number or turns so and so forth. Long story short a certain twist pattern might kill the interference and another might double it. Test, as it is with your setup before trying to twist.
Q: what about ferrite rings?
A: once again its setup Dependant. If you are running short motor wires and IMU cables it might be quite possible to get a clean I2C signal without any rings. It might be also helpful to use voltage regulator, BEC, Video RX/TX, ETC with good filtering. Generally its a good practice to have at least one ferrite ring where the IMU cable connects to the controller.
If you are building a large gimbal using ferrite rings at every connector is a good idea.
Q: I plugged in my IMU Cable but get no feedback from the sensor.
A: There are 3 ways the IMU can be wired
1) 2 Axis Board Only
- Check the IMU for physical damages
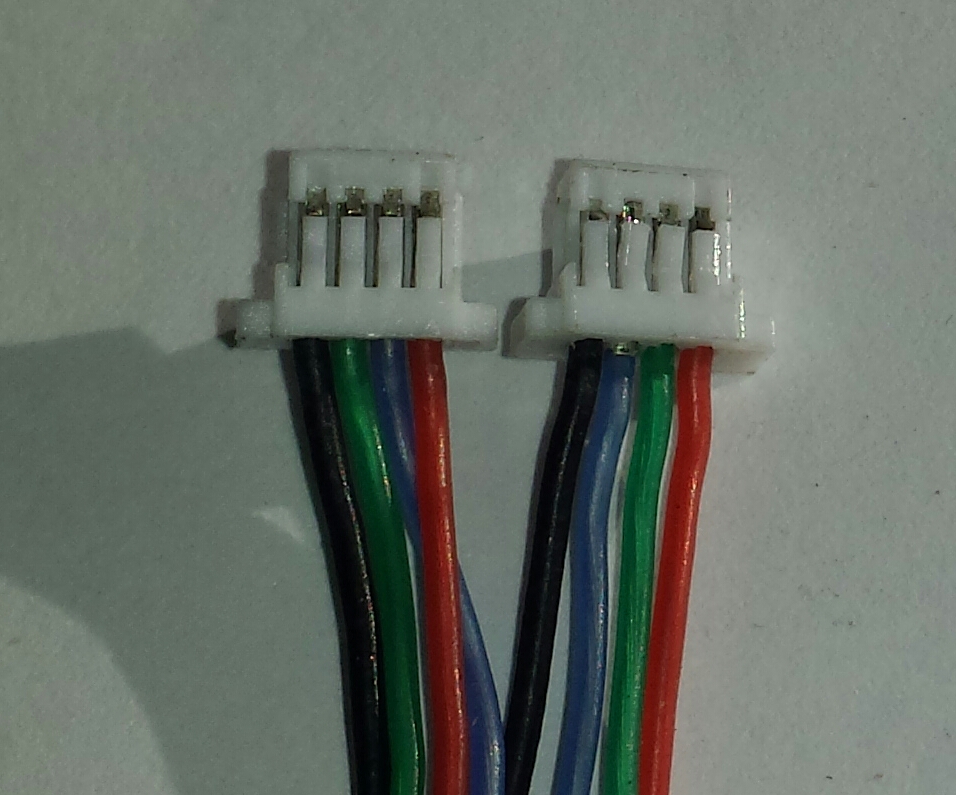
- If you are using a premade IMU cable make sure the color code is matches on either end. Sometimes you can come across a miswired IMU cable

- Bad IMU
2) 2 Axis board with separate 3 axis board
- Make sure the pass through IMU connectors and properly seated
- Both, 2 Axis and 3rd axis board will need external power
- Power the boards first then plug in USB connector
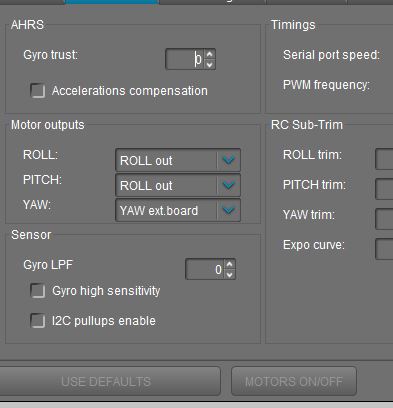
- Check whether EXT 3rd axis option is enabled under advanced TAB in the GUI
- If you suspect the culprit is 3rd axis add-on board, unplug power plug in the IMU sensor directly to the 2-Axis board, power on, and check for IMU sensor connectivity in the GUI.
- You can also click [USE DEFAULTS] enable 3rd axis, and try again
- Make sure the 3rd axis headers are properly soldered. Make sure the daughter-board (the small board that sits on top of the 3rd axis board) is seated properly. Double check all the IMU connections to both boards
3) 3rd Axis board stacked on top of the 2 axis
- Check the IMU for physical damages
- If you are using a premade IMU cable make sure the color code is matches on either end. Sometimes you can come across a wrongfully wired IMU cable
- Bad IMU
Motor Connections:

Motor connections will be labeled Motor 1 & Motor 2. It’s a good practice to add ferrite rings near the controller boards. Although it might not be critical if you are running smaller cameras and short wires from the motors to the board.

There is no specific way to connect the wires as in a certain order or polarity. Brushless motors do not have a polarity per say since they are turned using a pulse. The direction of the motor is critical for gimbal operation and how to get it turning in the right direction, will be addressed further down. If you are handy with tools you can crimp a JR or Futaba style servo connector or directly solder the 3 wires from each motor to the board. As mentioned above do not worry about order of the wires since it can be all changed via the GUI when you start to tune. If you do crimp the ends, make sure that crimp is secure and there is proper contact between the exposed part of the wire and the crimp end. Intermittent motor connections will create havoc when you start tuning and will be very hard to diagnose.
You have to make sure that ROLL and PITCH motors are connected to the correct motor driver. Sometimes the labels on the board can be confusing so skip the labels. No matter which board you have in hand you can use the following method to identify drivers.
Unplug both motors from the board. Assuming you have default settings loaded to the board with USB connected turn the power down to ‘0’ on pitch and yaw. Enter ‘100’ for the Roll Power.
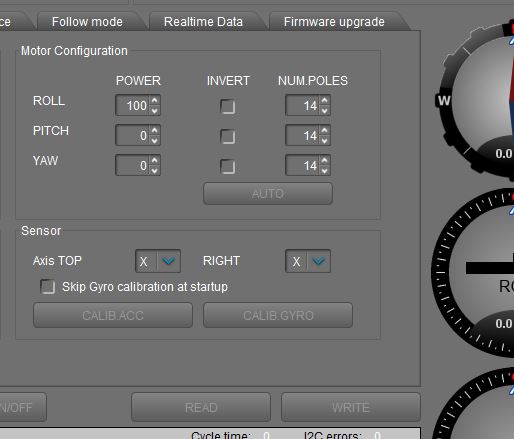
Now get the end of the ROLL motor and try one Motor output at a time. Once you hear the high pitch noise, that will be the roll output from the controller. Plug in the pitch motor to the remaining connector.
If you have already soldered the motor wires, not to worry. Follow the the above instructions and if you hear the high pitch sound from the wrong motor, go in to the GUI, under advanced swap the motor outputs to the way you have wired.

work in progress…… [lastupdated] PST