2.3b4
Firmware: SimpleBGC_2_3b4.enc.hex (84Kb 7.11.2013)
(84Kb 7.11.2013)
GUI: SimpleBGC_GUI_2_3b4.zip (5Mb 7.11.2013)
(5Mb 7.11.2013)
User manual: SimpleBGC_manual_2_3_eng.pdf (407Kb 7.11.2013)
(407Kb 7.11.2013)
IMPORTANT NOTE: you will loose all previous setting after upgrading to this version.
!!PLEASE, SAVE SETTINGS TO FILE BEFORE UPGRADING!!
- Bug fixed: multiple YAW turns caused variable overflow and instability
- Bug fixed: if the system starts in the YAW lock mode, the camera can accidentally rotate to fixed angle.
- Bug fixed: in Follow PITCH mode, if camera is pitched by 30-50 degree, ROLL looses horizon level if panning by YAW.
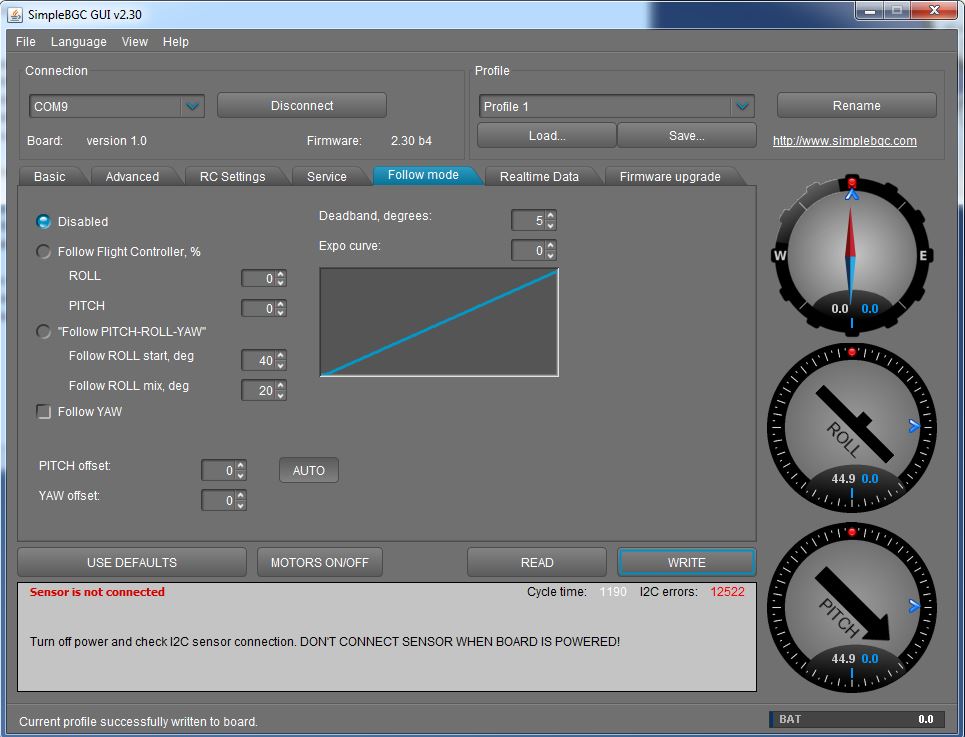
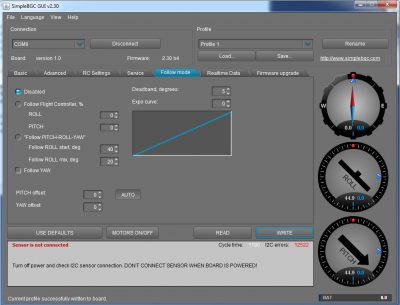
- Follow PITCH mode extended by the new setting to configure the ROLL axis lock-to-follow transition.
- If Flight Controller (EXT_FC) is connected and calibrated, the system becomes more stable in the bigger range of inclination angles (even pitched +-80 degrees)
- Battery monitoring and buzzer:
- Voltage drop compensation (PID becomes stable during whole battery lifecycle)
- Low-Voltage alarms and motor cut-off
(This feature will be supported on some newest boards or old ones with the hardware mod. See user manual for details.)
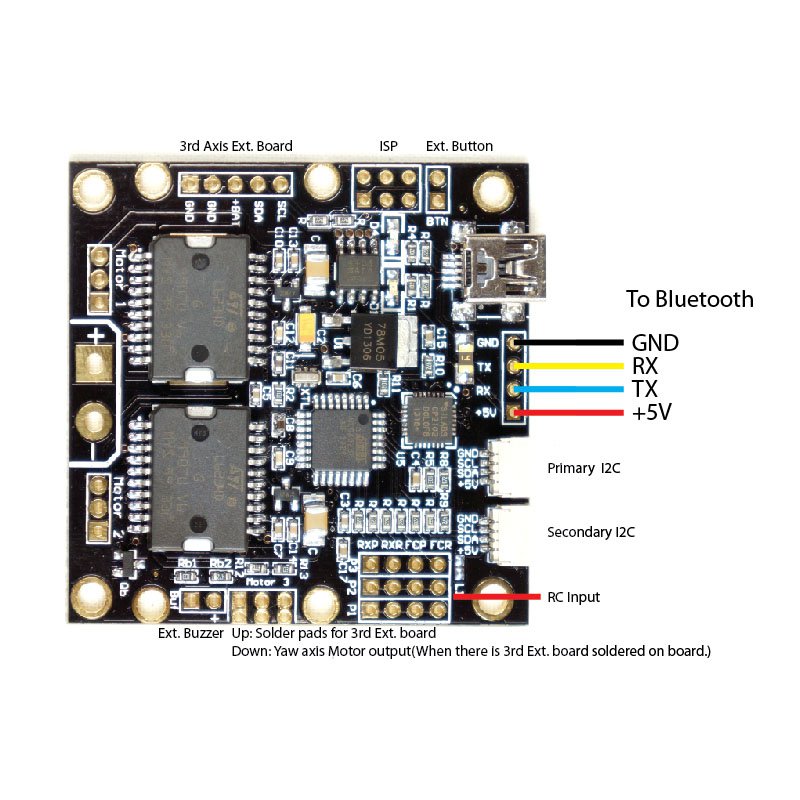
- RC mapping improved: Any of PWM, Sum-PPM, or Analog modes may be set for any of RC inputs separately.
- it lets to use YAW-encoder or joystick together with RC control or External Flight Controller
- it may be required to re-configure RC inputs after firmware upgrade
- RC mix option: you can mix 2 inputs together before applying to any of ROLL, PITCH or YAW axis. It lets to control camera from 2 sources (joystick and remote for example)
- Serial API extended by the ‘C’ command (camera control). Example written in C++ for Arduino is provided in doc.
- New option to limit angular accelerations in case of hard RC or Serial control (useful to prevents jerks or skipped steps, smoother camera control, less impact on multirotor’s frame)
- PID settings: I-term internally multiplied by P-term to increase I response when P is high.
- “Compensate acceleration” algorythm removed to free up program space for more important features
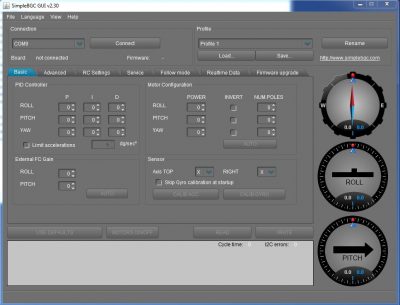
- (GUI) New Full-screen mode available to better fit GUI in small displays
- (GUI) Bug fixed: firmware upgrade fails if working path contains spaces.
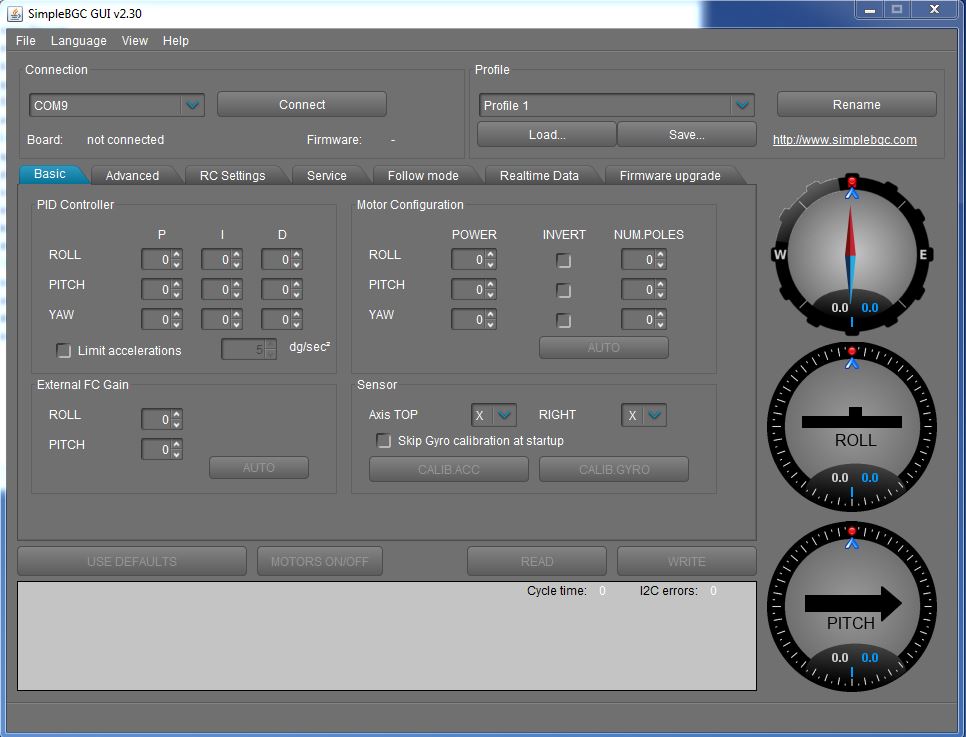
- (GUI) New button to switch motors ON/OFF
- (GUI) Italian and Czech translation (thanks to Iacopo Boccalari, Lubos Chatval)
- (GUI) 2 new high-contrast themes for outdoor usage
- (GUI) New red marker: shows RC controlled angle that gimbal should maintain