
[wp_lightbox_prettyPhoto_video link=”https://www.youtube.com/watch?v=GGibOCUp_GU” description=”Alexmos SimpleBGC Firmware 2.4 Released” source=”https://aerialpixels.com/wp-content/uploads/2014/02/Alexmos-Software-2.4.jpg” title=”Alexmos SimpleBGC Firmware 2.4 Released” show_logo=”0″ show_info=”0″]
A new algorithm for increased reliability when motor misses steps: PID gain is decreased, POWER is increased to restore synchronization
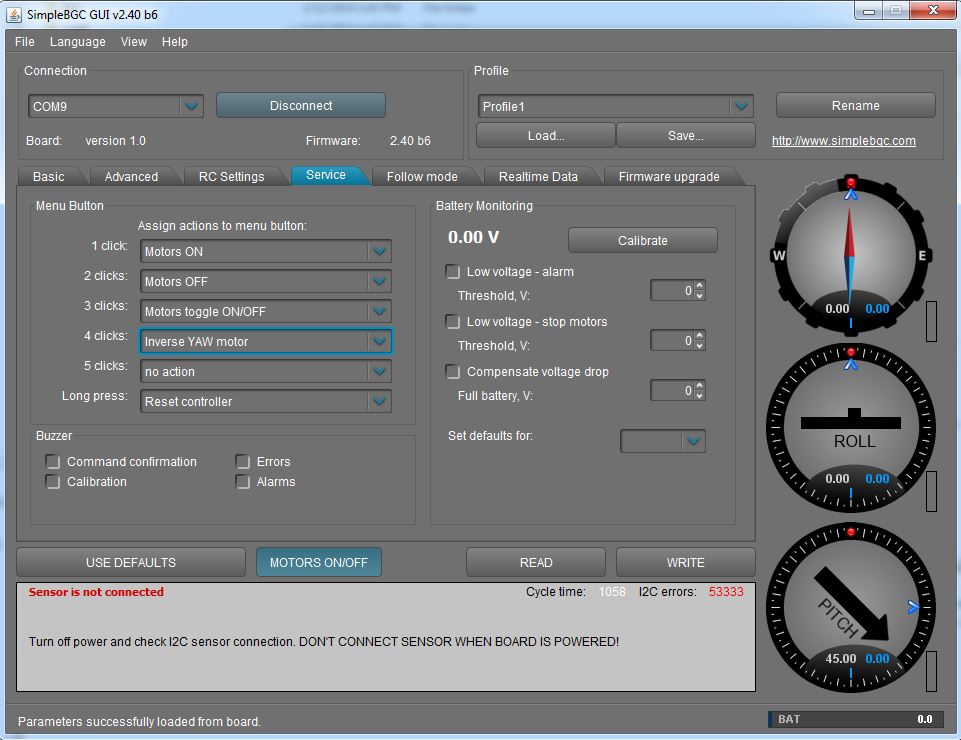
New menu commands to turn motors ON/OFF.
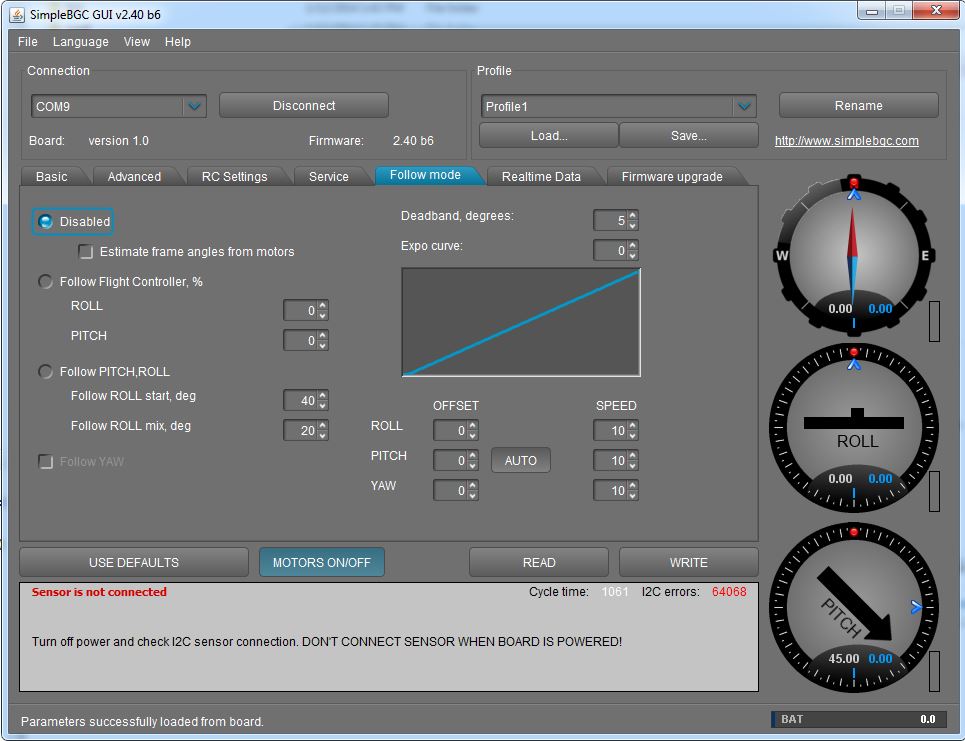
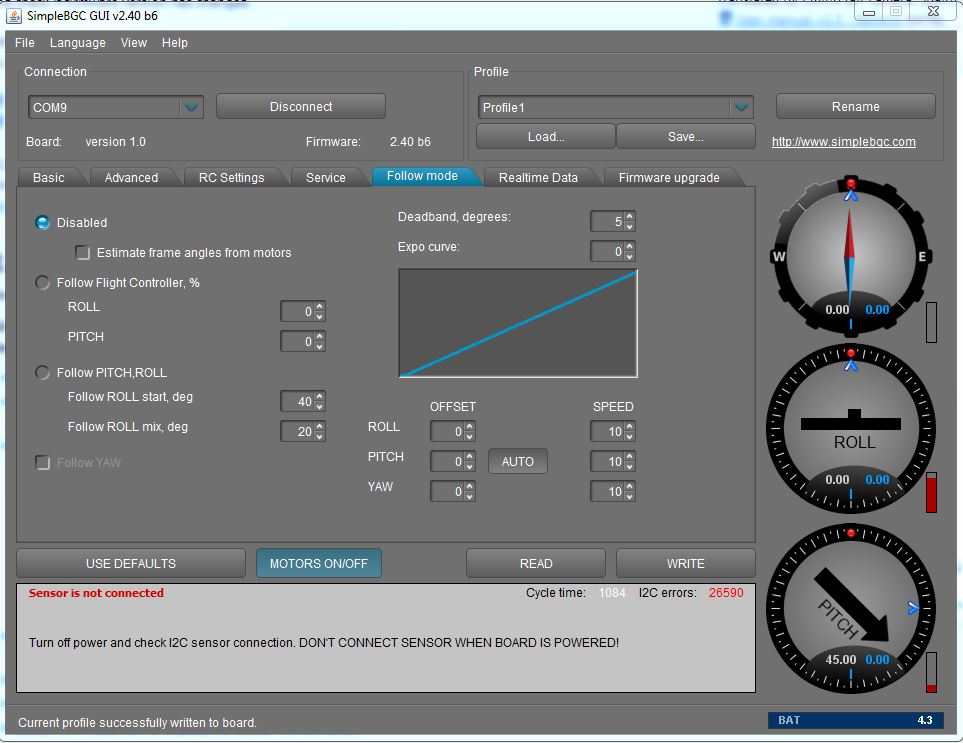
Follow for the PITCH+ROLL and YAW axis can be activated independently
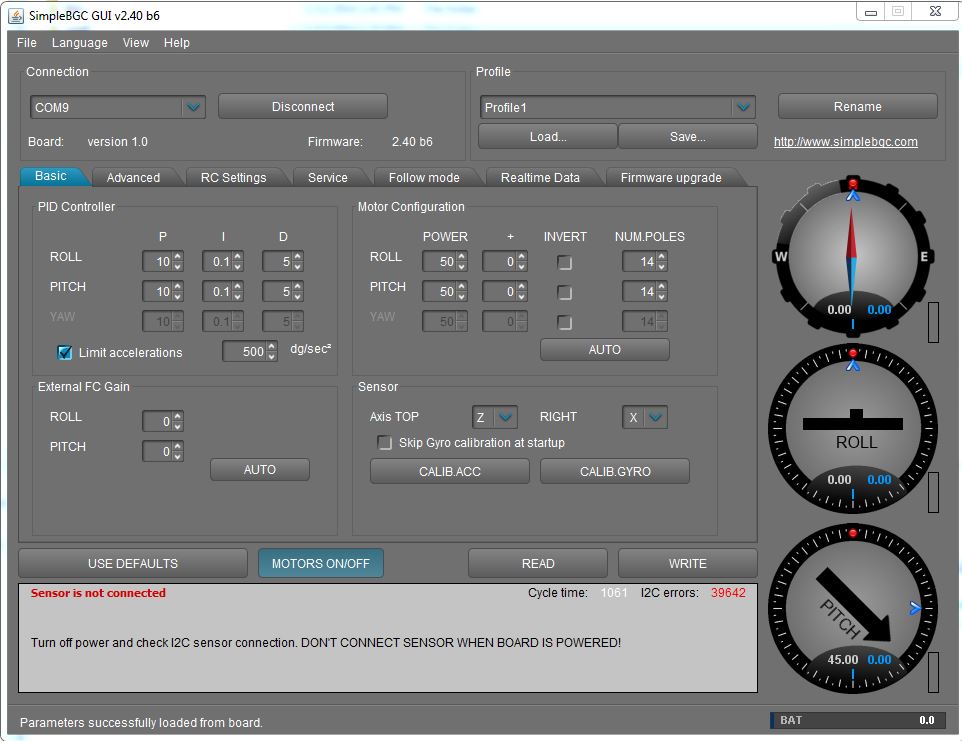
New realtime visual bar to display the actual POWER level.
2.40b6
Firmware: SimpleBGC_2_40b6.enc.hex (86Kb 4.02.2014)
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_40.zip (5Mb 4.02.2014)
User manual: SimpleBGC_manual_2_4_eng.pdf (428Kb 2.02.2014)
- Bug fixed: some parameters are always kept their default values regardless of GUI setting
- A new algorithm for increased reliability when motor misses steps: PID gain is decreased, POWER is increased to restore synchronization
- Follow mode was completely rewritten:
- speed can be adjusted in wide range by the “SPEED” setting
- acceleration limiter is applied
- LPF smoothing is applied (configured in the “RC setting” tab)
- Follow for the axes PITCH+ROLL and YAW can be activated independently
- Follow for ROLL axis may be permanently enabled or disabled regardless of camera PITCHing: to disable completely, set “ROLL start”=90, “ROLL mix”=0, to enable set “ROLL start=0”, “ROLL mix=0”. (Note, that proper Follow offset calibration for ROLL is required now)
- Up to 5x more precision with the new PID (increase I-term until oscillation starts and than reduce a little back to get the maximum from it)
- New menu commands to turn motors ON/OFF.
- (GUI): new setting for additional POWER in case of big error (caused by missed steps).
- (GUI): new visual bar to display the actual POWER level.
- (GUI): new setting to enable estimation of the frame angle from motor’s poles in the Lock mode, like in the Follow mode before. Helps to increase the range of frame angles where gimbal’s operation is stable.