
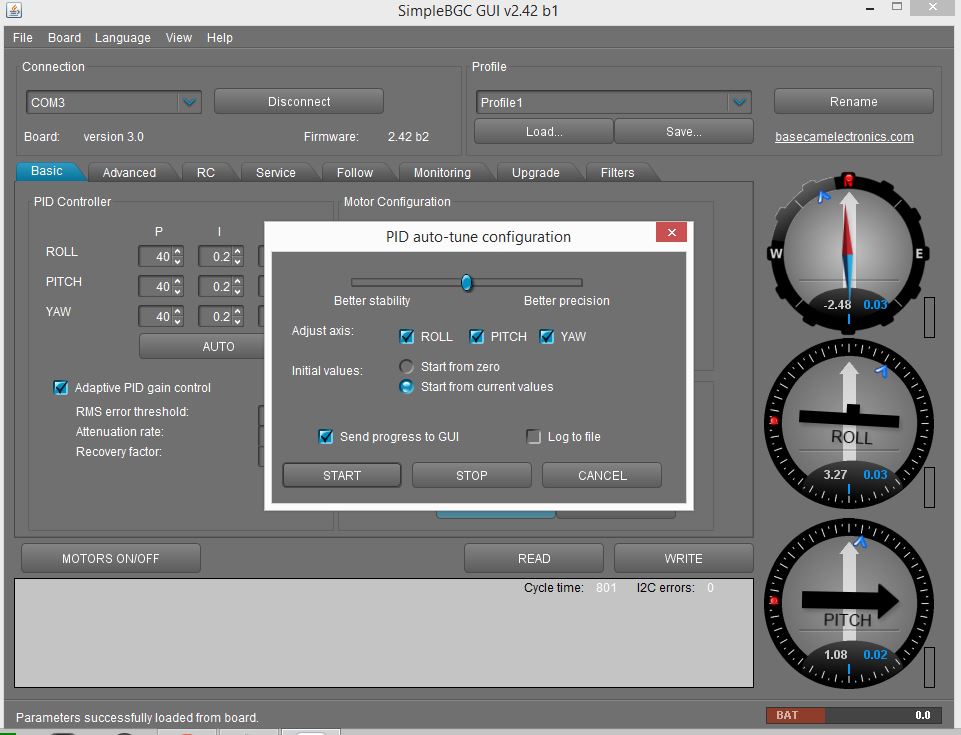
Auto PID Tuning – Autotune
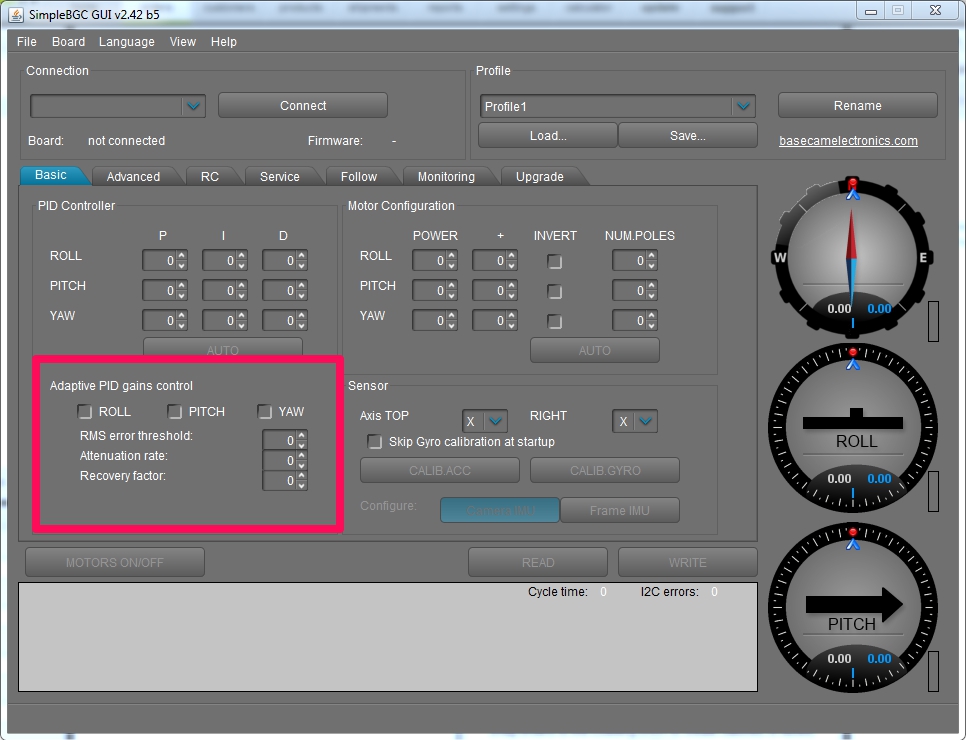
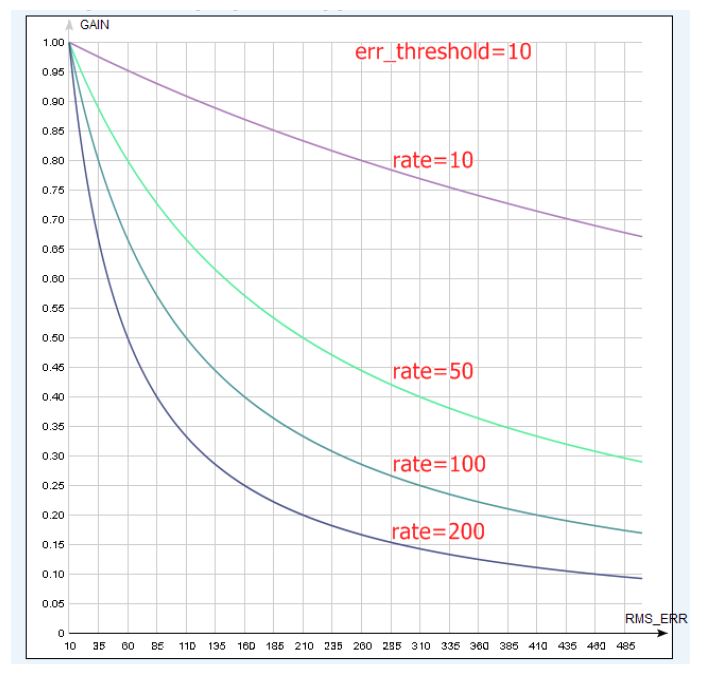
Adaptive PID gains – Selectively for each axis
This settings group lets to adaptively decrease PID gains, when the system becomes unstable due to
high PID gains. For example, system may be tuned very well in certain position, but it may become
completely unstable in different position. Self-excitation may cause strong vibration, that may negatively
affect gimbal construction and may be even dangerous for the camera. Also, when vibration
accidentally comes, it may brake whole footage. Possible workaround is to use adaptive PID control.
PWM servo output

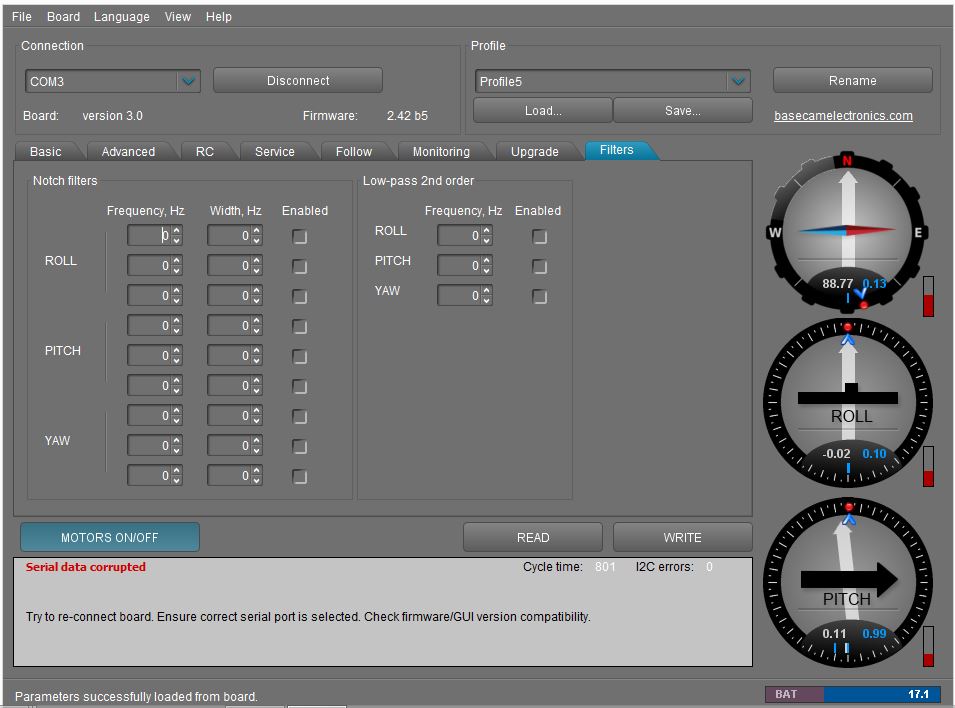
Digital Filters
Notch Filters
These filters can reject narrow bandwidth. They can help in case when the system has a pronounced
mechanical resonance.
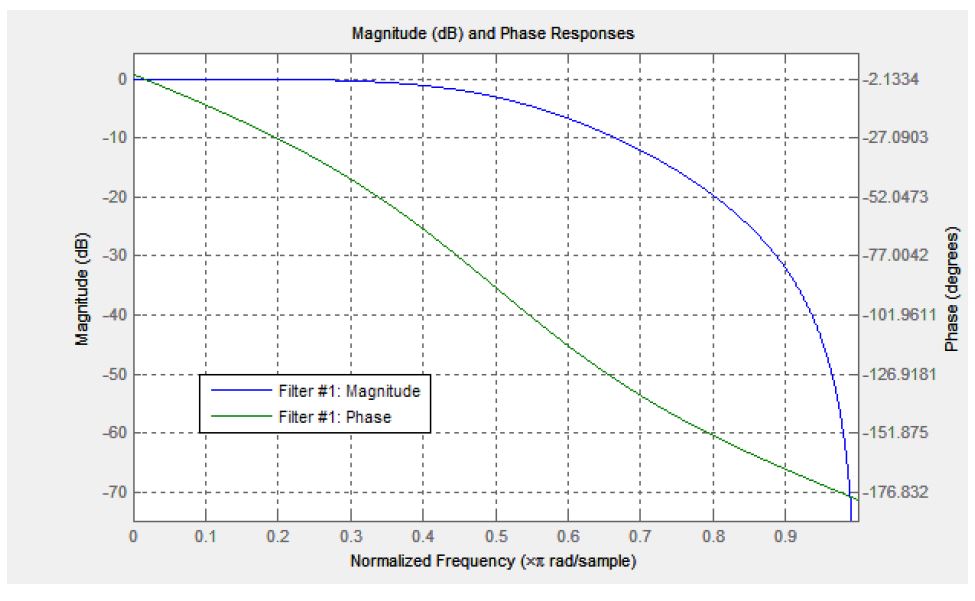
Low-pass filter
Applying this filter can be needed for large gimbals (heavy cameras with high moment of inertia) or for gimbals
with reduction gear. The working frequency range for them are lower than of the lightweight gimbals. But factor
D of PID-regulator increases feedback the more, the higher frequency.

-
Latest Alexmos Autotune Firmware Version 2.42b6
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_42b6.zip
User Manual (english): SimpleBGC_32bit_manual_2_42_eng.pdf
Alexmos 32 Bit V2.42B5 Autotune with GH4 – How it works
[wp_lightbox_prettyPhoto_video link=”https://www.youtube.com/watch?v=DH1-CDi0GYA” width=”800″ height=”600″ description=”Alexmos 32 Bit V2.42B5 Autotune with GH4 ” source=”https://aerialpixels.com/wp-content/uploads/2014/08/alexmos-autotune.jpg” title=”Alexmos 32 Bit V2.42B5 Autotune with GH4 “]
RokSteady G4 Brushless Gimbal using Alexmos 2.42B5 Autotune

- A Gimbal Designed around the Panasonic GH4
- Total weight (including camera & lens) with Batteries 5.9lbs (2.6kg)
[wp_lightbox_prettyPhoto_video link=”https://www.youtube.com/watch?v=5bMvZ59mW88″ width=”800″ height=”600″ description=”RokSteady G4 Brushless Gimbal using Alexmos 2.42B5 Autotune” source=”https://aerialpixels.com/wp-content/uploads/2014/08/Roksteady-G4-3-Axis-Brushless-Gimbal.jpg “]