
Updates:
– PWM servo output
– PID auto-tuning
– Adaptive PID gains
– Digital filters to remove resonances
– Bug fixed: upside-down settings lost after switching to different profile
– “Frame upside-down” command now inverts RC control for YAW, together with inverting YAW motor and rotating second IMU
– Bug fixed: should ignore CMD channel during initial GYRO calibration
– MOTORS_ON command resets system to home position
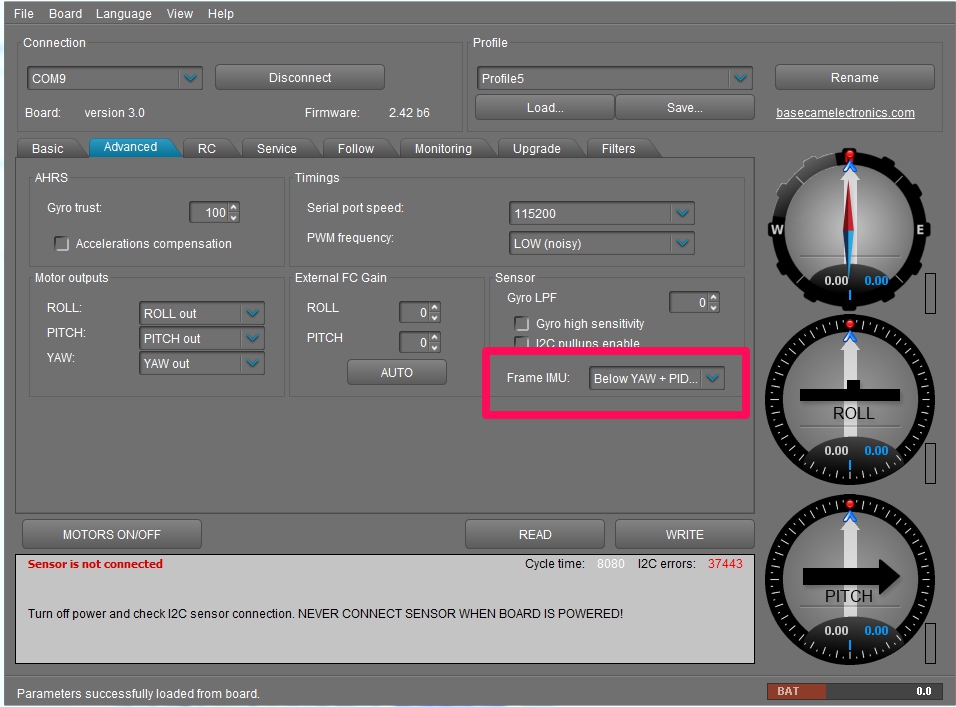
– New option for second (frame) IMU: “Below YAW + PID source”. It means, if Frame IMU is mounted below YAW motor, it can be used as data source for PID controller, and in some cases can give better result, than main IMU.
– (GUI) UI elements re-arranged to adopt new settings and make grouping more consistent
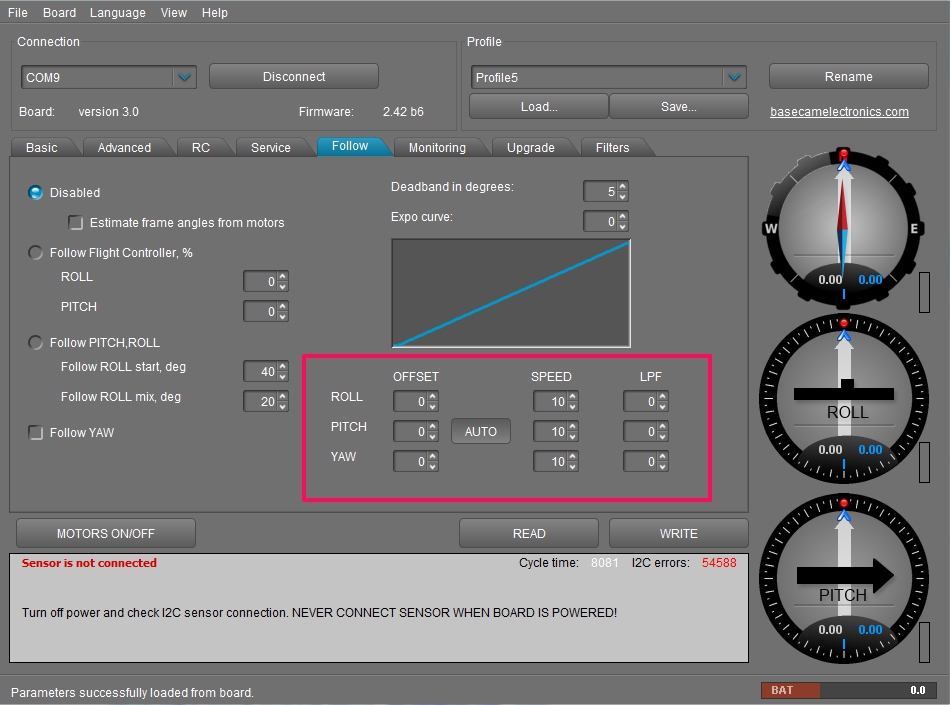
– (GUI) Separate LPF setting for RC and Follow Mode
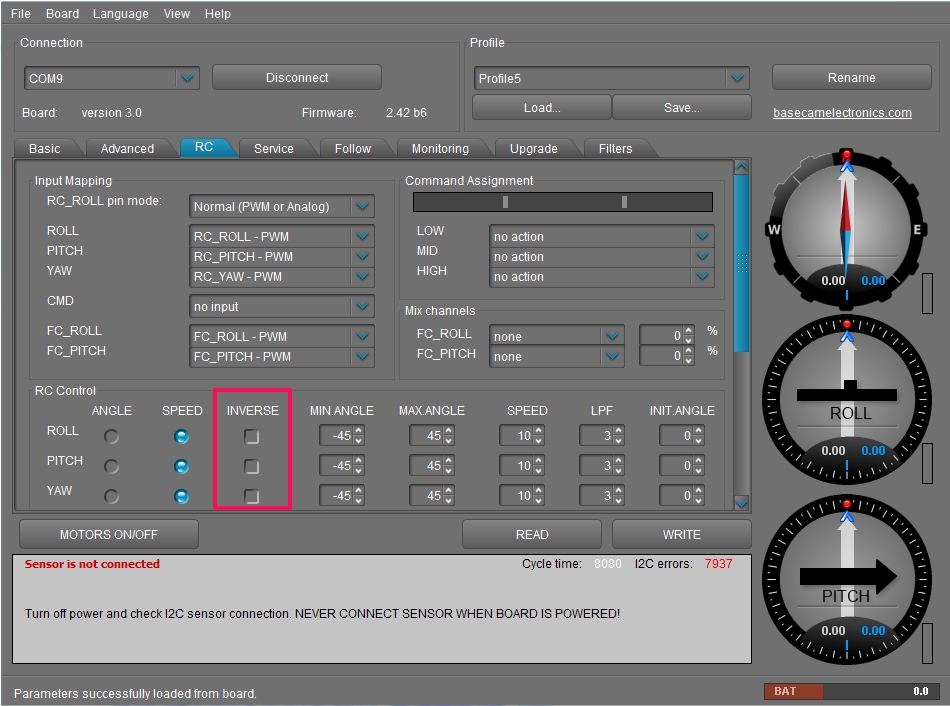
– (GUI) New setting “RC Inverse” (you can use it or switch Min. and Max. angles, as before)
-
Latest Alexmos Autotune Firmware Version 2.42b6
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_42b6.zip
User Manual (english): SimpleBGC_32bit_manual_2_42_eng.pdf