



Description
CLICK HERE FOR THE UPDATED CONTROLLER
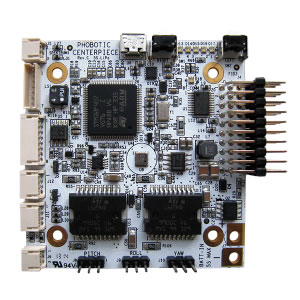
The next generation Alexmos controller. High voltage support up to 6s (30v) specially for larger gimbals running 80 mm and larger brushless gimbal motors.
The controller can be used for building high-quality 3-axis camera stabilizing systems which can be mounted to UAV and for building handheld camera stabilizers.
This version of the controller is our new direction in the development of the stabilizing solutions. It will replace the previous 8-bit version of the SimpleBGC controller, keeping 100% back-compatibility, but adding the new fuctionality.
True 6S support (Upto 30V) and monitoring
Camera IMU Example
Basic functions of the controller
- 32-bit MCU — ARM Cortex M4. Effectively calculates the complex tasks for 3-axes stabilization.
- Allows camera control with the RC or analog joystick.
- Use several switchable profiles for different modes of operation
- Supports variety of RC protocols: PWM, Sum-PPM, spektrum and s-bus.
- Battery voltage monitoring, compensating voltage drop in the PID-regulator.
- Low battery alarm (output to 5V active buzzer).
- Increased number of inputs for controlling signals + 3 additional reserved input/output AUX1-AUX3.
- Can supply up to 1A current for external devices on the 5V power line.
- Dedicated UART-socket to connect optional Bluetooth module
- Reverse-polarity protection, overheat and overcurrent protection
- USB interface for the PC connection, to configure, control and upgrade firmware.
- Graphical user interface to manage the settings. Windows / OS X / Linux versions.
- Control through the Serial-protocol using dedicated API.
- Improved attitude estimation algorythms
- Optional second IMU, that will increase the short-term precision of the stabilization 10x-30x times and will make stable work in any frame position.
IMU ‘Y’ Adapter for Dual IMU Connection is included
Specifications
| Size of the board: | 70.5 × 50.5 x 15 mm |
| Distance between the mounting holes: | 45 mm |
| Diameter of the mounting holes: | 3 mm |
| Power supply voltage: | 3S to 7S |
| Maximum motor current: | 1,5 A |
| 5V output current to power external devices: | up to 1 A |

Downloads for 32-bit boards
General documentation and specifications
Connection Diagramm for boards ver.3.0
Serial Protocol Specification (ver. 2.4)
Firmware upgrade 2.42b6 – AUTOTUNE Support
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_42b6.zip
User Manual (English): SimpleBGC_32bit_manual_2_42_eng.pdf
- 4xPWM servo output with adjustable rate to output virtual channels decoded from RC input, or driven by Serial API
- PID auto-tuning
- Adaptive PID gains
- Digital filters to remove resonances: 3 x Notch filters, 2nd-order low-pass filter
- Bug fixed: upside-down settings lost after switching to different profile
- “Frame upside-down” command now inverts RC control for YAW, together with inverting YAW motor and rotating second IMU
- Bug fixed: should ignore CMD channel during system init
- MOTORS_ON command resets system to home position
- New option for second (frame) IMU: “Below YAW + PID source”. It means, if Frame IMU is mounted below YAW motor, it can be used as data source for PID controller, and in some cases can give better result, than main IMU.
- (GUI) UI elements re-arranged to adopt new settings and make groupping more consistent
- (GUI) Separate LPF setting for RC and Follow Mode
- (GUI) New setting “RC Inverse” (you can use it or switch Min. and Max. angles, as before)
- Last used profile is saved as default when switched by service button, RC CMD command of from GUI.
- Bug fixed: s-bus fast mode was not decoded correctly
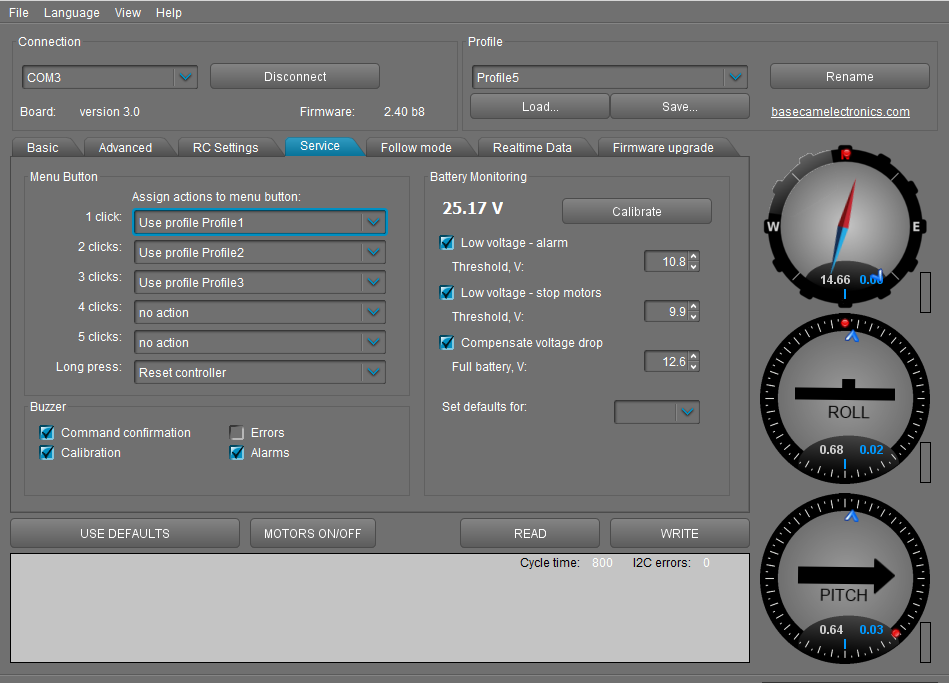
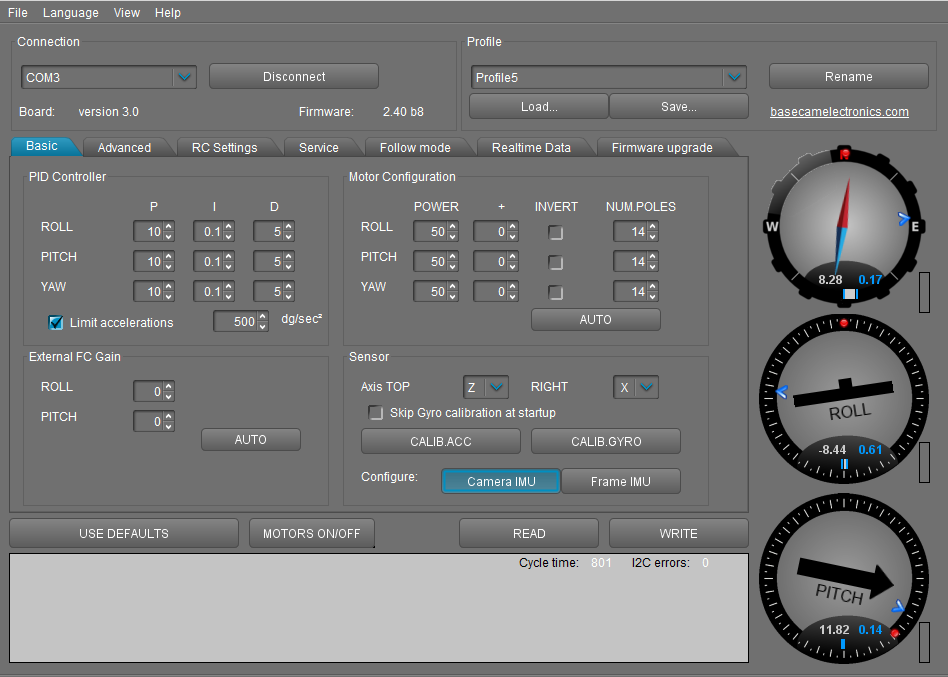
Alexmos 32 BIT SimpleBGC controller quick tuning configuration guide
Note about brushless gimbals & Controllers
Brushless gimbals and controllers are very new to the market and is an emerging technology. You will need some patience and effort to get it to work as seen on youtube. THIS IS NOT A PLUG AND PLAY DEVICE!
You will need some understanding of Microsoft windows drivers, software settings and tuning the gimbal software to your liking and to suit your multirotor.
We will try our best to answer your questions and point you in the right direction but getting things to work the way it’s supposed to will be YOUR RESPONSIBILITY. Please understand this before you purchase any Brushless Gimbal Related Item.









Reviews
There are no reviews yet.